智能驾驶功能定义、分类与评估方法研究。
INTELLIGENT DRIVING PRODUCT PORTFOLIO
Research / Product / Standardization柯思悦
智能驾驶产品研究与作品集
长安大学交通运输硕士,聚焦智能驾驶功能标准化研究,关注行业分析、功能解构与产品方案设计。 能够将标准研究、企业实践与公开资料整理为结构化分析结论,并推动研究结果向产品判断与方案表达转化。
行业研究
标准对比
功能解构
产品方案
行业研究、评估框架搭建与结构化报告输出。
智能驾驶产品实习,偏研究分析、方案设计与协同推进。
Current Log
智能驾驶产品研究
围绕功能定义、评估口径与测试验证支撑产品判断,持续输出行业研究与方法分析。
从 SAE、国标、欧盟项目与企业实践中提炼关键问题。
关注功能解构、测试验证与产品方案设计之间的连接关系。
具备日常驾驶经验,能结合真实场景理解驾驶行为。
围绕功能定义、分类与评估口径形成可用于产品判断的研究结论
兼顾逻辑分析、结构化表达,以及面向产品、研发与测试的协同推进
PROJECTS
项目作品集
以研究问题、分析路径与输出结果为主线,展示我在智能驾驶产品与 AI 产品项目中的方法与实践。
Case Files / 02
记录方式:问题定义 / 路径拆解 / 判断输出
标准研究
功能解构
项目 01
标准化研究
汽车智能驾驶功能标准化定义及分类方法研究
参与智能驾驶功能标准化定义及分类方法研究,围绕功能解构、行业对比和评估口径统一支撑标准立项与课题研究输出。
- 背景:面向自动驾驶功能组合、测试验证和安全评估场景,行业内长期存在功能单元定义不统一、场景与功能需求绑定不足的问题。
- 目标:建立基于驾驶任务的功能解构与分类思路,支撑功能覆盖度判定、横向对比和标准化评估体系建设。
- 我的行动:系统跟踪 SAE、国标、欧盟项目及 Waymo、Cruise、华为、小鹏等国内外标准、项目与企业实践,梳理功能拆解与场景构建方法,输出行业研究与标准对比结论。
- 结果:支撑 CSAE 团体标准立项汇报与年度课题总结,并为后续测试验证、安全评估和功能覆盖度判定提供方法研究基础。
项目完整介绍
这个项目聚焦汽车智能驾驶功能标准化定义及分类方法研究,核心任务是从行业研究、标准对比和功能解构角度, 找到自动驾驶功能定义、评估口径和测试验证之间可以被统一的方法基础。
在研究过程中,我重点梳理了 SAE、国标、欧盟项目和国内外企业在功能拆解与场景构建上的不同路径, 识别出“功能单元定义不统一、跨主体难以横向对比、评估口径缺少统一依据”等核心问题, 并参与基于驾驶任务的功能解构与分类思路研究。
研究流程
- 收集 SAE、国标、欧盟项目与国内外企业实践资料,建立行业研究底稿。
- 围绕功能拆解、场景构建与评估口径统一问题进行标准对比分析。
- 参与功能解构与分类思路研究,输出支撑立项汇报与课题总结的结构化材料。
Prototype Showcase
原型图展示

功能解构框架示意
用于展示从连续驾驶场景到功能单元拆分的分析路径,体现研究中“任务切片与功能定义”的核心思路。

标准与企业实践对比
用于展示 SAE、国标、欧盟项目及头部企业在功能拆解与场景构建方法上的差异,突出标准对比研究过程。
AI Agent
训练闭环
项目 02
AI 产品设计
AI 面试训练 Agent
围绕求职者面试训练中反馈不稳定、追问不连续、复盘难沉淀的问题,设计并上线一款覆盖训练诊断、模拟面试、回答分析与最终复盘的 AI 面试训练 Agent。
- 背景:通过分析 50+ 篇面试经验帖和面试官访谈内容,识别出用户在训练阶段普遍存在评估主观、追问断裂、复盘结果难复用的问题。
- 目标:以岗位 JD、简历信息和历史训练记录为输入,搭建“训练前诊断 + Agent 模拟面试 + 回答分析 + 最终复盘”的闭环产品结构。
- 我的行动:独立完成 PRD、竞品分析、Agent 决策闭环、技术架构、产品原型、指标评估方案与前后端上线实现。
- 结果:完成 AI 面试训练 Agent 从 0 到 1 的产品化实践,形成可展示的 PRD、技术图、原型图、竞品分析和指标评估材料。
项目完整介绍
这个项目聚焦求职者在面试训练过程中“练了很多轮,但反馈不稳定、追问不连续、复盘难沉淀”的典型问题。 我希望它不只是一个回答生成工具,而是一个能够围绕岗位要求持续诊断、追问、评估和复盘的训练 Agent。
在产品设计上,我将项目拆成 PRD 文档、竞品分析、Agent 决策闭环、技术架构、原型设计和指标评估方案几部分。 其中 PRD 负责说明产品边界,Agent 闭环负责说明系统如何决策,原型负责呈现完整训练路径,指标方案则用于回答产品后续如何验证效果。
项目流程
- 从用户面试准备痛点出发,梳理岗位模板、训练诊断、动态追问、最终复盘和历史报告回看的 MVP 范围。
- 设计 Agent 决策闭环、技术架构、隐私边界和异常兜底流程,明确模型调用与产品交付之间的边界。
- 完成训练首页、训练前诊断、模拟面试、回答分析、最终复盘和移动端布局等核心原型,并补充产品、模型、技术三层指标。
Prototype Showcase
原型图展示
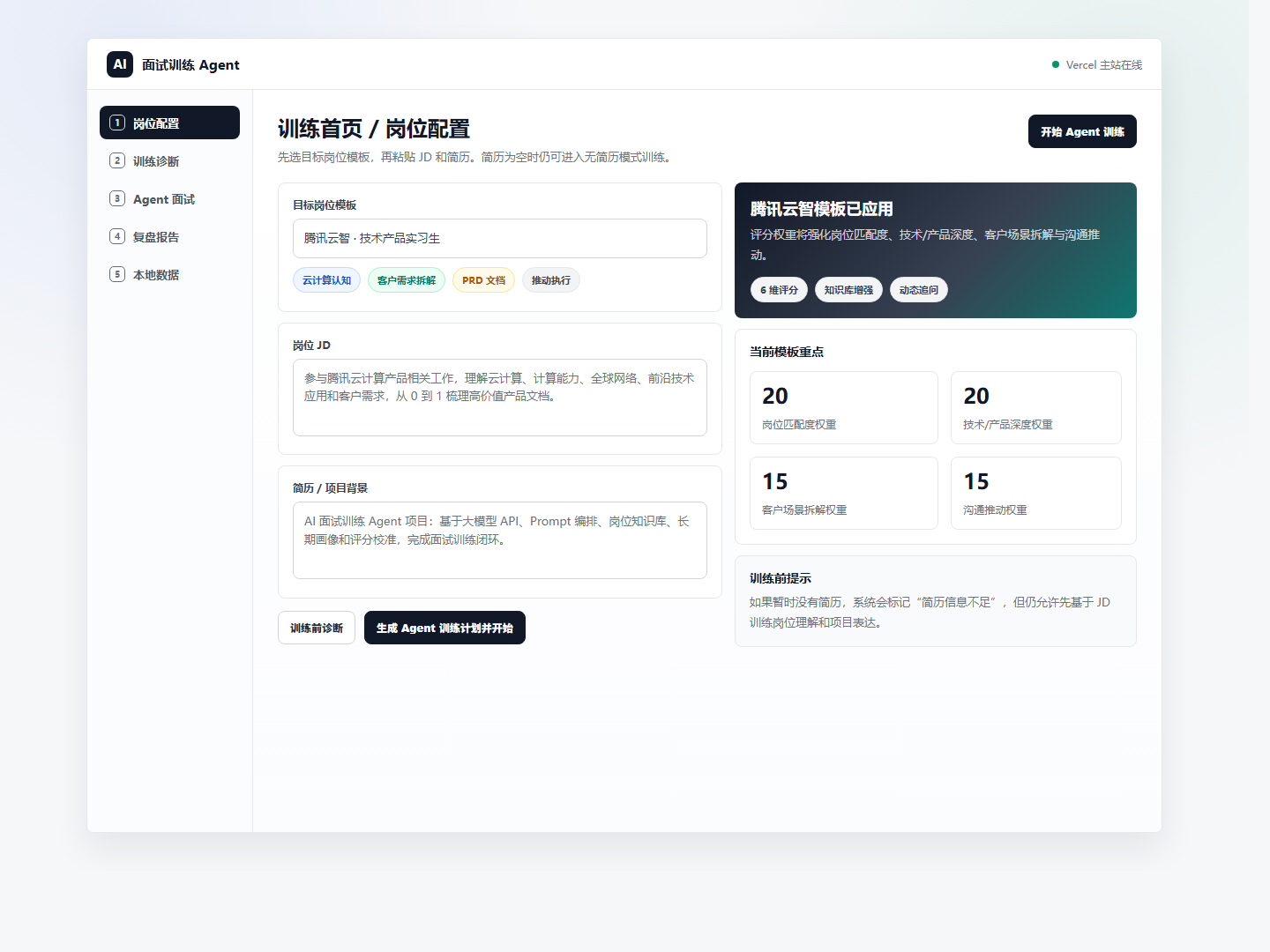
训练首页 / 岗位配置
用户选择岗位模板,输入 JD 与简历/项目背景,进入训练前诊断或直接生成 Agent 训练计划。
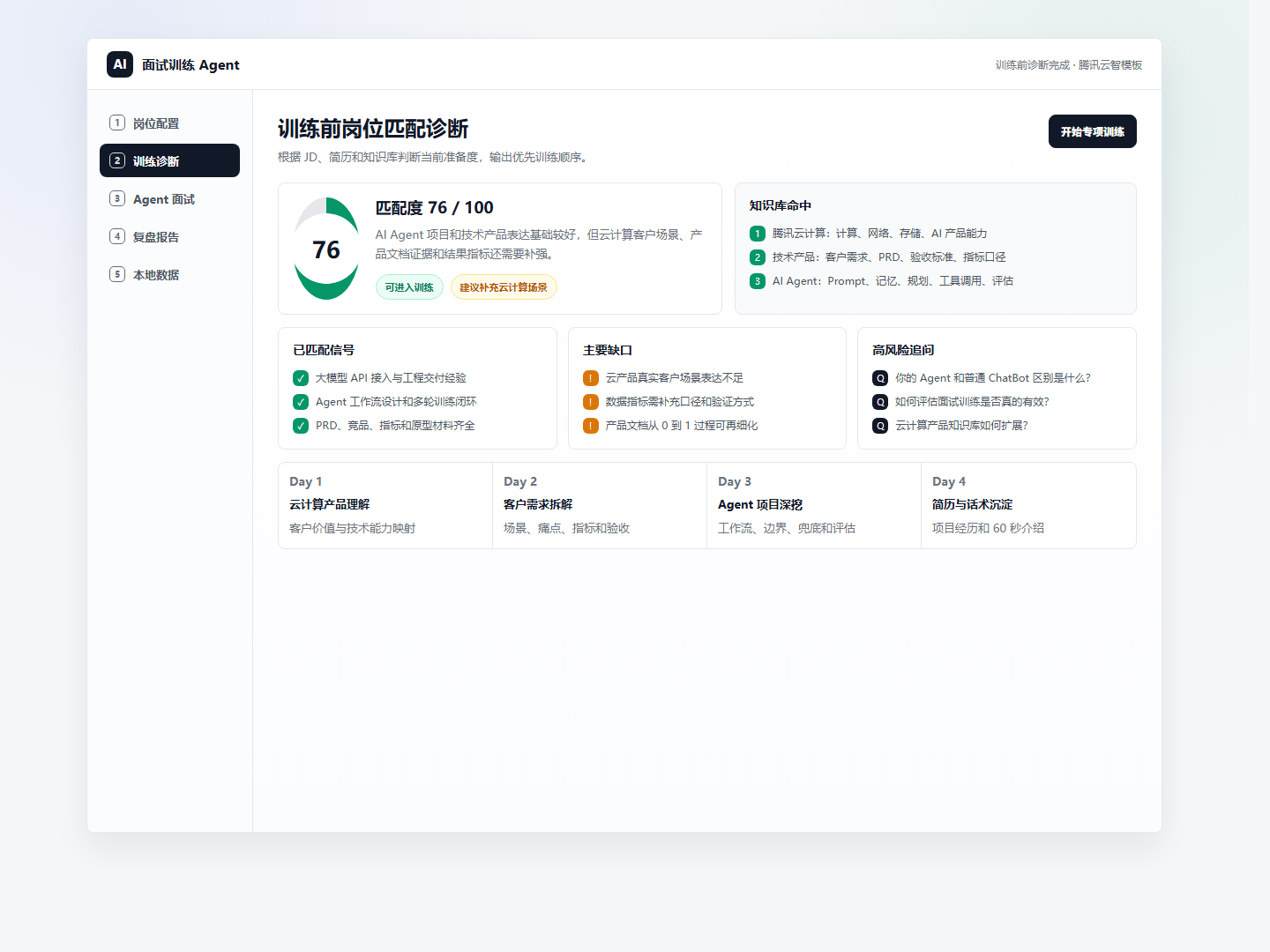
训练前岗位匹配诊断
展示匹配度、知识库命中、已匹配信号、主要缺口、高风险追问和训练顺序。
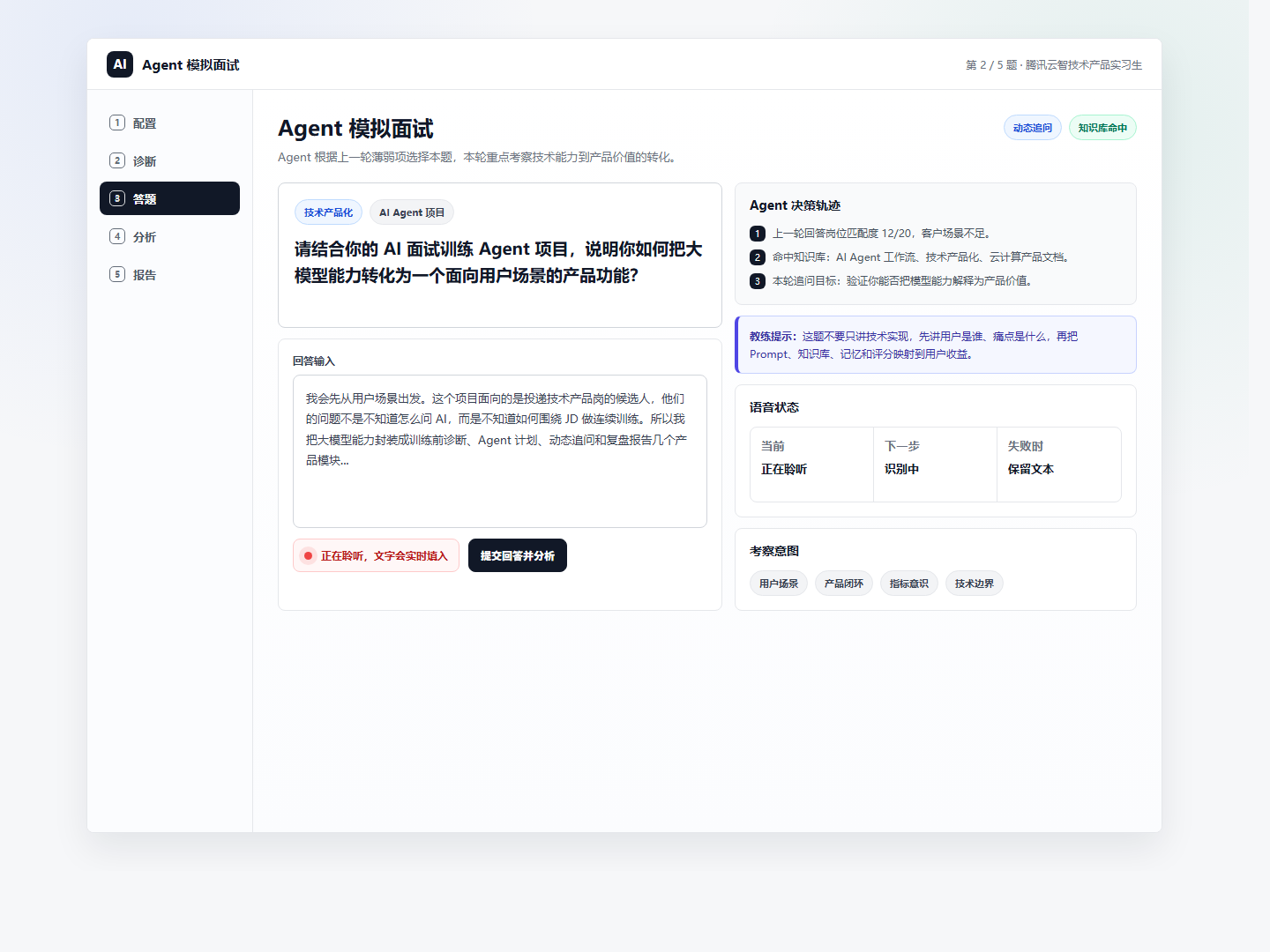
Agent 模拟面试
承接动态追问、回答输入、语音识别状态、考察意图和 Agent 决策轨迹展示。
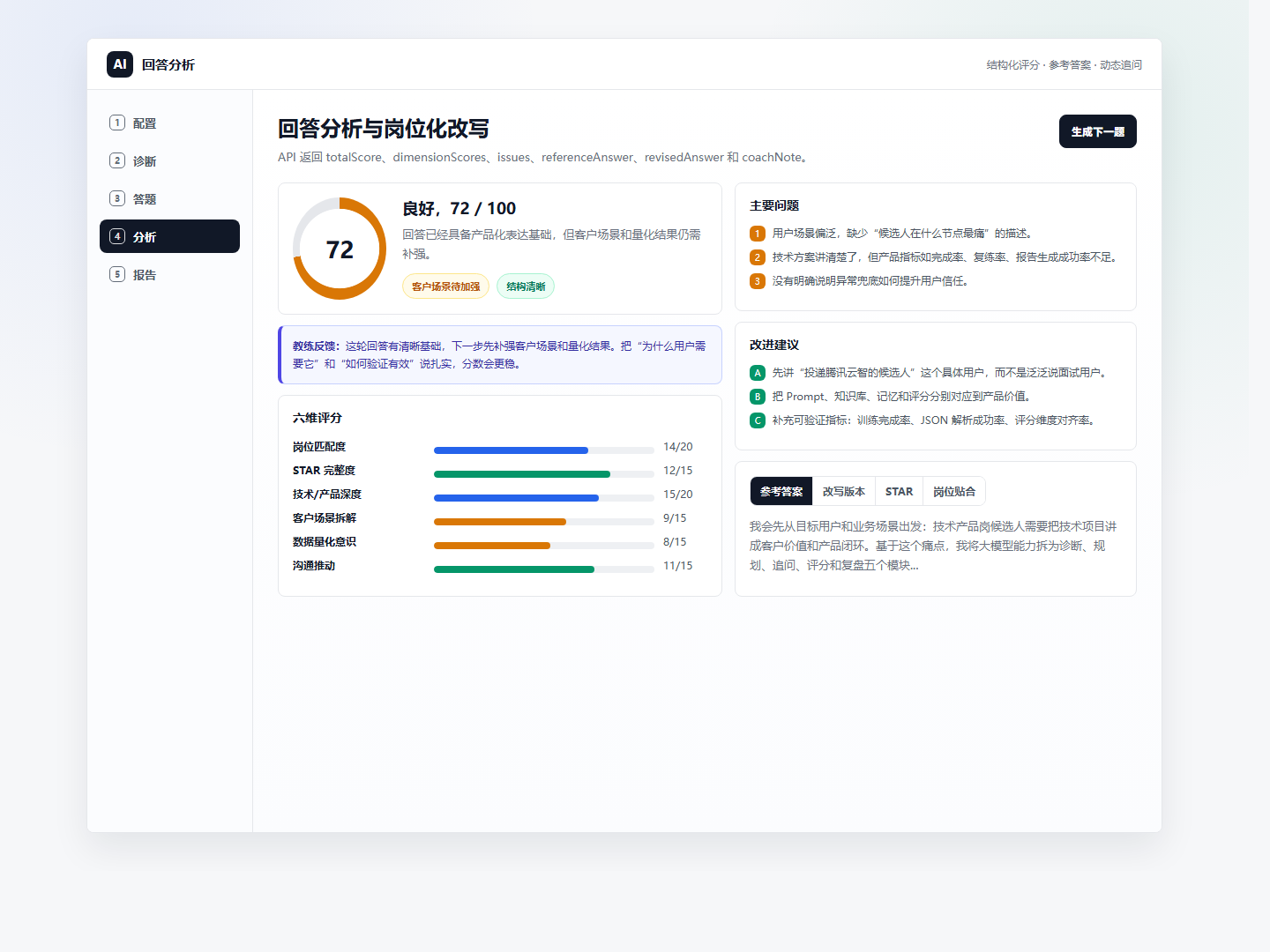
回答分析与岗位化改写
展示 totalScore、dimensionScores、issues、referenceAnswer、revisedAnswer 和 coachNote。
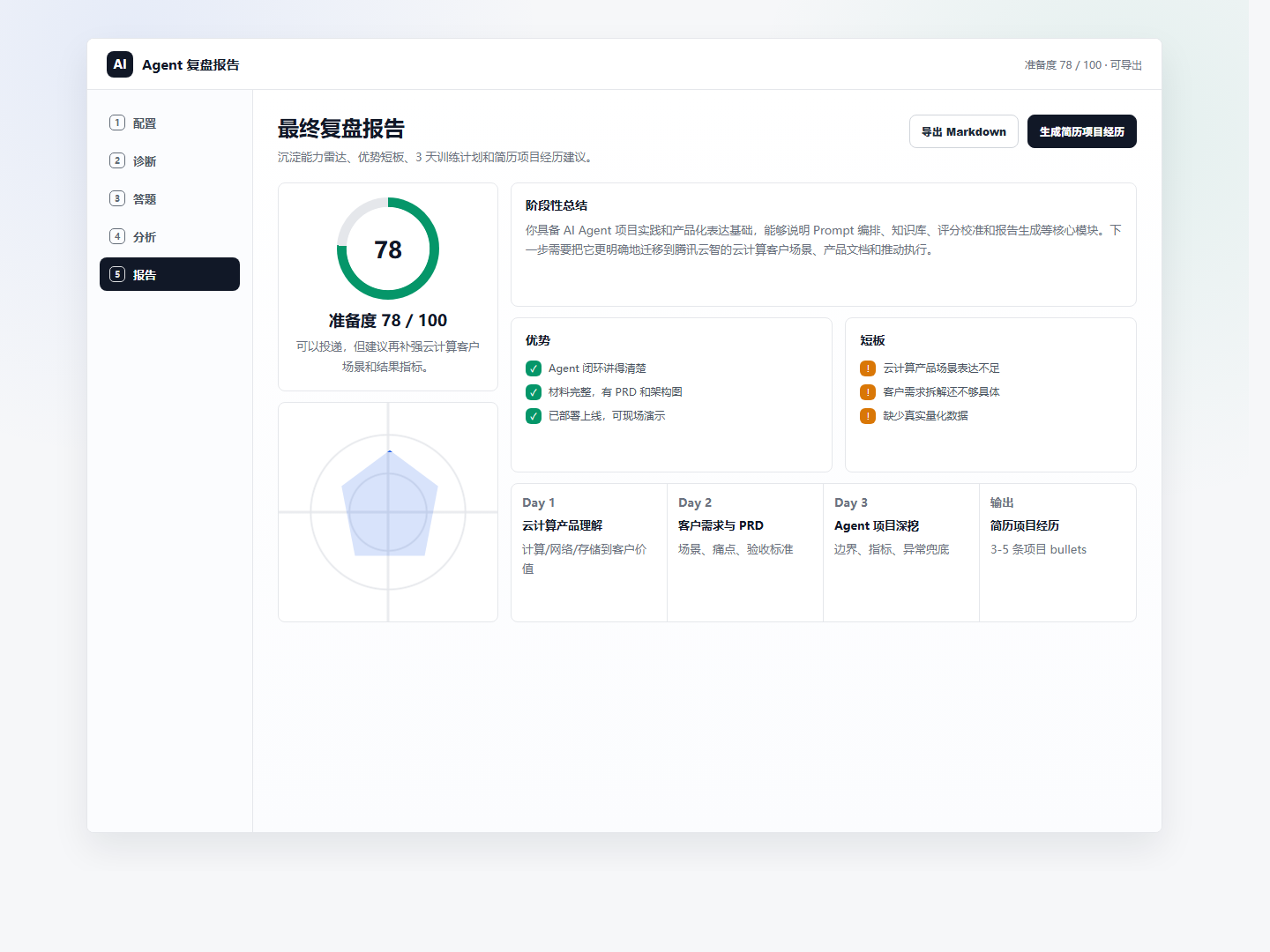
最终复盘报告
沉淀准备度、优势短板、三天训练计划和简历项目经历生成建议。
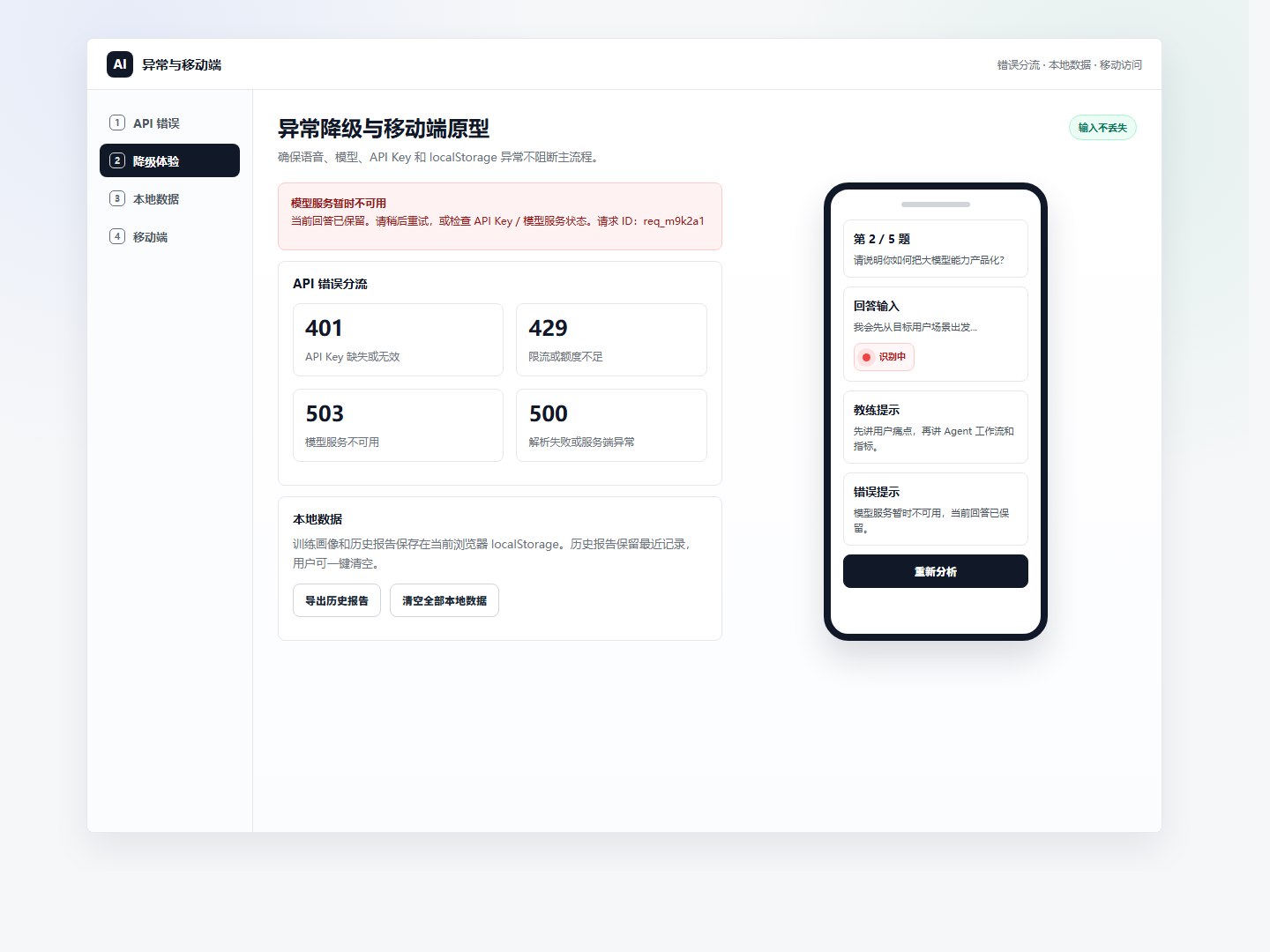
历史报告 / 移动端布局
覆盖历史报告回看、输入不丢失、异常提示和移动端访问体验,让训练结果能够被持续复用。
TRACKING
行业跟踪与判断
该部分集中展示行业跟踪、产品拆解与竞品对比相关研究内容,重点在于将分散的公开信息转化为可支持产品判断的分析结论。
Tracking Notes / 02
输出方式:行业跟踪 / 产品分析(含对比附表)
智能驾驶行业演进跟踪:从技术验证走向规模化落地
围绕政策环境、技术路线与渗透率变化三个维度,判断智能驾驶行业是否已进入新的发展阶段。
判断 2026 年是否构成智能驾驶行业的重要阶段节点
这份跟踪不以年度新功能、新车型的发布信息为重点,而是围绕一个更基础的问题展开:智能驾驶行业是否已经由技术验证阶段进入更具确定性的规模化落地阶段。 如果答案是肯定的,那么产品分析的重点也需要相应调整,从单一功能能力转向规则边界、成本变化与用户实际采用情况。
从政策、技术与市场三条主线交叉观察行业成熟度
根据中汽协 2026 年 1 月发布的《2025 城市 NOA 汽车辅助驾驶研究报告》,2025 年 1-11 月我国搭载城市 NOA 功能的乘用车累计销量达 312.9 万辆, 渗透率为 15.1%。在此基础上,分析主要沿三条线展开:政策边界是否继续明确,技术路线是否逐步收敛,以及高阶智驾是否已从高端尝鲜阶段走向更广泛的用户渗透。
- 2026 年可以视为较为明显的阶段分界点,行业讨论重点已由“能力是否可实现”转向“能力能否稳定落到更大规模的车型与用户”。
- 随着城市 NOA 持续下沉,竞争重点正在由功能覆盖广度逐步转向稳定性、安全感与用户教育能力。
- VLA、世界模型等方向仍值得持续跟踪,但其最终能否形成产品优势,仍取决于成本、规则与真实场景适配程度。
对产品岗位而言,这类行业跟踪的价值不在于补充资讯本身,而在于识别真正影响产品节奏的关键变量。很多时候,决定产品推进速度的并非单一技术点,而是政策、成本与用户接受度是否同步走到相应阶段。
智能驾驶核心产品竞争格局与技术演进分析
以头部产品为样本,围绕竞争格局、技术路线与功能差异展开分析,并据此判断智能驾驶产品后续可能的技术演进方向。
从头部产品分化中观察竞争格局和技术演进方向
这部分分析聚焦当前头部智能驾驶产品的分化格局。与其简单讨论谁强谁弱,更重要的是看不同厂商分别在押注什么路线, 这些路线如何体现在功能能力和场景表现上,以及它们最终可能把行业带向怎样的演进方向。
从竞争格局、技术路线与功能表现三个层面展开分析
分析先从头部阵营的竞争位置切入,再分别梳理多传感器融合、纯视觉/VLA、规模化下沉等不同路线的特征, 最后结合夜间、雨雾、拥堵、窄路等典型场景对功能表现进行对照,以此观察不同方案的能力边界和演进重点。
- 当前竞争格局已由单纯的功能追赶,转向头部方案之间在稳定性、复杂场景处理能力和价格带覆盖上的综合竞争。
- 技术路线层面,多传感器融合仍在高阶方案中保持优势,纯视觉与 VLA 路线则在复杂场景理解和迭代效率上持续拉开差异。
- 功能对比层面,夜间、雨雾、窄路、拥堵、泊车等高频场景正在替代“功能是否具备”本身,成为更有区分度的比较维度。
- 从演进趋势看,未来产品竞争大概率会继续沿着两条线展开:一条是高阶方案持续提升复杂场景稳定性与安全冗余,另一条是通过规模化和成本优化推动能力下沉。
对产品工作而言,这类分析的价值在于把竞争判断建立在更具体的技术路线和功能表现之上,而不是停留在概念层面。 当竞争格局、路线选择和典型场景表现被放到同一视角下观察时,才更容易判断一项能力究竟应继续上探,还是应该优先考虑规模化落地。
以目标人群与体验特征作为主线,对头部产品进行横向印证
为了避免正文只停留在路线和趋势判断,这里补充一张横向对比表,重点观察不同产品分别面向什么人群、突出什么体验,以及对应的价格带位置。
- 华为系产品更适合面向重视稳定性和高阶体验完整度的用户,体验特征集中在“全场景覆盖”和“使用门槛更低的安心感”。
- 小鹏更容易吸引对新技术敏感、愿意尝试复杂场景能力的用户,其体验特征主要体现在路线激进和迭代节奏快。
- 理想更适合放在家庭用户的使用语境中理解,舒适性、稳妥感和整车协同体验是其更突出的感知价值。
- 比亚迪对应的人群更广,体验重点不在单项极致,而在于把智驾能力以更低门槛带入主流价格带。
这一附表主要用于印证正文中的路线与趋势判断,也帮助把“技术差异”进一步转译为“用户差异”和“体验差异”,使整份分析更完整。
CONTACT
联系我
如果你希望进一步了解我的项目思路、研究方法或对智能驾驶产品的理解,欢迎随时联系我。
Email
kesy770408@163.com
作品集入口: 智能驾驶岗位版本 / AI/技术产品经理版本